Klizanje tela niz strmu ravan
Klizanje tela niz strmu ravan je klasičan problem iz dinamike u fizici.
Kada telo klizi po ravni koja zaklapa ugao α sa horizontalom,
komponenta gravitacione sile duž ravni je m·g·sin(α).
Ako zanemarimo trenje, ubrzanje tela je:
a = g·sin(α)
U realnim uslovima često se uvodi koeficijent trenja μ, pa se
rezultujuća sila duž ravni smanjuje za μ·m·g·cos(α),
a ubrzanje postaje:
a = g·(sin(α) – μ·cos(α))
Simulacija u Processing‑u
Za interaktivnu simulaciju klizanja tela niz strmu ravan u Processing‑u, pogledajte primer: Primer strma ravan u Processing‑u .
Resursi
Teorija: Sile na nagnutoj ravni
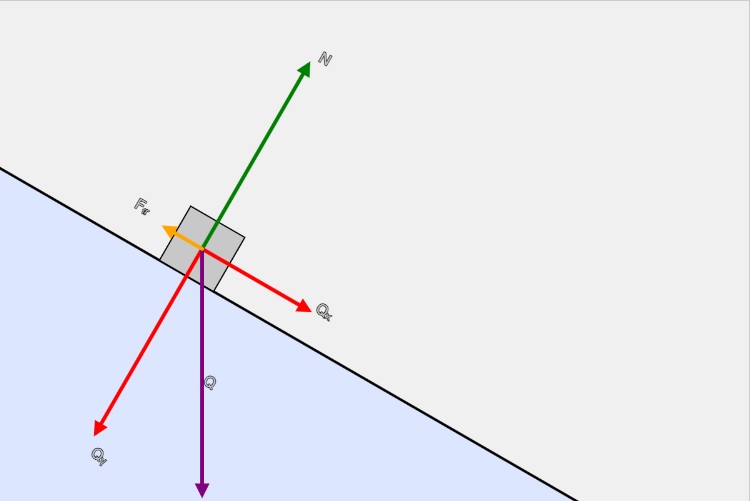
Na telo mase m koje leži na ravni nagnutoj pod uglom α deluju sledeće sile:
- Težina
Q = m·g, usmerena vertikalno naniže. - Komponenta težine paralelna ravan
Qₓ = Q·sin(α) = m·g·sin(α), usmerena naniže duž ravni. - Komponenta težine normalna na ravan
Qᵧ = Q·cos(α) = m·g·cos(α), usmerena u ravni prema unutra. - Normalna sila
N = Qᵧ = m·g·cos(α), suprotnaQᵧ. - Trenje
Fₜᵣ = μ·N = μ·m·g·cos(α), suprotno smeru klizanja.
U simulaciji računamo akceleraciju duž ravni kao razliku paralelne komponente težine i trenja, podeljenu sa masom:
a = (Qₓ – Fₜᵣ) / m
= [m·g·sin(α) – μ·m·g·cos(α)] / m
= g·sin(α) – μ·g·cos(α)
Pozicija x(t) i brzina v(t) duž ravni dobijaju se standardnim kinematičkim izrazima:
x(t) = x₀ + v₀·t + ½·a·t²
v(t) = v₀ + a·t
Ovako definisani izrazi ulaze u p5.js petlju draw(), gde se u svakoj iteraciji
ažuriraju položaj i brzina tela po formuli iznad, a zatim se sve sile crtaju kao strelice u centru bloka.
Animacija klizanja tela niz strmu ravan pomoću alata p5.js
Ova animacija prikazuje kako blok klizi niz nagib pod uglom α koristeći JavaScript biblioteku
p5.js. U centru bloka crtaju se sile:
Qₓ (paralelna komponenta težine), Qᵧ (normalna komponenta),
N (normalna sila) i Fₜᵣ (trenje).
U svakoj iteraciji izračunavamo ubrzanje
a = g·sin(α) – μ·g·cos(α), ažuriramo brzinu i položaj bloka, i crtamo
strelice koje predstavljaju sve sile. Kada blok stigne do kraja ravni, animacija se kratko zaustavlja,
blok se vraća u početni položaj i proces se ponavlja.
Primer animacije:
U nastavku možete dodati kontrole za ugao nagiba, koeficijent trenja ili početnu brzinu bloka, kako biste eksperimentisali sa ponašanjem simulacije.
Ova simulacija prikazuje klizanje tela niz strmu ravan i koristi biblioteku p5.js. Prikazani su i vektori sila koji deluju na telo: težina (Q), njene komponente (Qₓ i Qᵧ), normalna sila (N) i sila trenja (Fₜᵣ).
Parametri simulacije su definisani kao globalne promenljive: ugao nagiba, početna pozicija bloka, veličina bloka, gravitaciono ubrzanje i koeficijent trenja. U setup() funkciji kreira se canvas i smešta se u div sa ID-jem sketch-holder.
Koordinatni sistem je rotiran tako da x osa prati nagib, što omogućava jednostavnije izračunavanje položaja tela i komponenti sila. Funkcije translate(), rotate(), push() i pop() koriste se za lokalnu transformaciju sistema i vraćanje na prethodno stanje nakon crtanja pojedinačnih elemenata.
Struktura koda je podeljena u više funkcija:
drawIncline()— crta nagibdrawBlockAndForces()— crta telo i vektore silaupdateMotion()— izračunava pomeraj tela uz simulaciju trenjadrawArrow()— pomoćna funkcija za crtanje strelica
index.html
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<!-- Učitavanje biblioteka -->
<script language="javascript" type="text/javascript" src="libraries/p5.min.js"></script>
<script language="javascript" type="text/javascript" src="StrmaRavanOsnovnaSaVektorima.js"></script>
<style>
body { margin: 0; padding: 0; }
#sketch-holder {
width: 100%;
max-width: 600px;
margin: 20px auto;
border: 1px solid #ccc;
}
</style>
</head>
<body>
<div id="sketch-holder"></div>
</body>
</html>
StrmaRavanOsnovnaSaVektorima.js
// Simulacija klizanja niz strmu ravan
// Definisanje fizičkih i geometrijskih parametara
let alpha; // Ugao nagiba ravni
const blockSize = 50; // Veličina bloka (kvadrata)
const g = 9.81; // Gravitaciono ubrzanje
const mu = 0.2; // Koeficijent trenja
// Veličine za praćenje kretanja
let a; // Ubrzanje
let v = 0; // Brzina
let s = 0; // Pređeni put
const dt = 1/60; // Vremenski korak (60 FPS)
// Početne pozicije i granice
const startX = 150; // Početna x koordinata bloka
let inclineY; // Vertikalna pozicija nagiba
let maxS; // Maksimalno rastojanje koje blok može preći
// Promenljive za kontrolu stanja simulacije
let state = 'running'; // Trenutno stanje ('running' ili 'pause')
let pauseStart = 0; // Vreme početka pauze
const pauseDuration = 1000; // Trajanje pauze u milisekundama
function setup() {
// Inicijalizacija platna i podešavanja
const canvas = createCanvas(600, 400);
canvas.parent('sketch-holder');
alpha = PI / 6; // 30 stepeni
inclineY = height / 3;
maxS = width - startX;
a = g * sin(alpha) - mu * g * cos(alpha); // Ubrzanje niz nagib
// Podešavanja za crtanje
angleMode(RADIANS);
rectMode(CENTER);
textAlign(LEFT, CENTER);
}
function draw() {
background(240); // Osvežavanje pozadine
drawIncline(); // Crtanje strme ravni
updateMotion(); // Ažuriranje pozicije bloka
drawBlockAndForces(); // Crtanje bloka i sila
}
function updateMotion() {
if (state === 'running') {
v += a * dt; // Povećanje brzine
s += v * dt; // Povećanje pređenog puta
if (s >= maxS) {
s = maxS; // Zaustavi kretanje kada stigne do kraja
state = 'pause';
pauseStart = millis();
}
} else if (state === 'pause') {
if (millis() - pauseStart >= pauseDuration) {
s = 0;
v = 0;
state = 'running'; // Resetuj simulaciju
}
}
}
function drawIncline() {
push();
translate(0, inclineY); // Pomeri poreklo
rotate(alpha); // Rotiraj celu ravan
// Crtanje trougla koji predstavlja nagnutu ravan
noStroke();
fill(220, 230, 255);
triangle(0, 0, width*1.5, 0, 0, height);
// Linija po kojoj se kliza blok
stroke(0);
strokeWeight(2);
line(0, 0, width*1.5, 0);
pop();
}
function drawBlockAndForces() {
// Računanje komponenti sila
const Qx = g * sin(alpha),
Qy = g * cos(alpha),
N = Qy,
Ftr= mu * N,
scaleF = 20; // Faktor skaliranja za prikaz vektora
// Izračunavanje pozicije bloka
let bx = startX + s,
by = inclineY + bx * tan(alpha);
push();
translate(bx, by);
rotate(alpha);
translate(0, -blockSize/2);
// Crtanje bloka
fill(200);
stroke(0);
rect(0, 0, blockSize, blockSize);
// Crtanje vektora sila i oznaka
drawArrow(createVector(0,0), createVector(Qx*scaleF, 0), 'red');
text('Qₓ', Qx*scaleF+5, -5);
drawArrow(createVector(0,0), createVector(0,Qy*scaleF), 'red');
text('Qᵧ', 5, Qy*scaleF+15);
drawArrow(createVector(0,0), createVector(Qx*scaleF,Qy*scaleF), 'purple');
text('Q', Qx*scaleF/2+5, Qy*scaleF/2+5);
drawArrow(createVector(0,0), createVector(0, -N*scaleF), 'green');
text('N', 5, -N*scaleF-10);
drawArrow(createVector(0,0), createVector(-Ftr*scaleF, 0), 'orange');
text('Fₜᵣ', -Ftr*scaleF-30, -5);
pop();
}
Objašnjenje koda animacije klizanja
-
Globalne promenljive:
ugao nagiba
alpha(pozitivno: ravan pada s leva na desno naniže), pozicija centra blokablockPos, veličina blokablockSize, gravitaciono ubrzanjeg, koeficijent trenjamu. -
U
setup()metodu:- Napraviti
createCanvas(600,400)i ugraditi ga u<div id="sketch-holder">sacanvas.parent(...). - Postaviti
alpha = PI/6i izračunati startnu poziciju:startX = 150; startY = startX * tan(alpha); blockPos = createVector(startX, startY); - Podesiti
angleMode(RADIANS),rectMode(CENTER),textAlign(LEFT,CENTER).
- Napraviti
-
U
draw()metodu:- Podešavanje pozadine:
background(240). - Pozivi
drawIncline()(linija i ispunjeni trougao) idrawBlockAndForces()(blok + sile). - Poziv
updateMotion()za ažuriranje brzine i položaja, pauzu i resetovanje.
- Podešavanje pozadine:
-
Metode za crtanje koriste:
push()/pop()— čuvanje i vraćanje transformacione matrice.translate(x,y)— pomeranje koordinatnog sistema.rotate(α)— rotacija koordinata.
-
Funkcija
updateMotion()(ili inline kod udraw()) radi ovako:// ubrzanje niz ravan blockAcc = g*sin(alpha) - mu*g*cos(alpha); // svaka iteracija: blockVel += blockAcc * deltaT; blockPos.x += blockVel * deltaT; // provera da li je blok stigao do desne ivice i pauza/reset…
Ovako definisani koraci čine kod modularnim, lakšim za razumevanje i održavanje.
Za detaljnije objašnjenje transformacija, pogledajte dokumentaciju p5.js za push()/pop(),
translate() i rotate().