RAVNO KRETANJE KRUTOG TELA
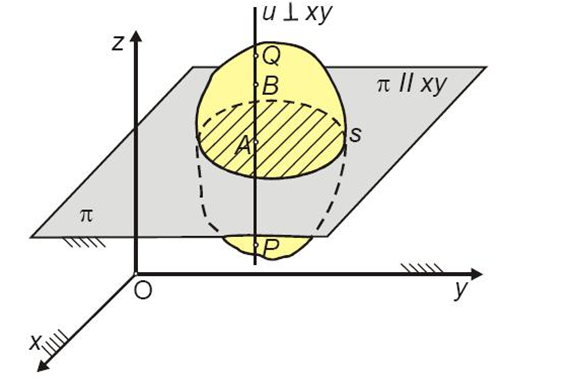
Ravno kretanje krutog tela je takvo kretanje pri kome se za sve vreme kretanja sve tačke tela kreću u ravni koja je paralelna nepomičnoj unapred uočenoj ravni
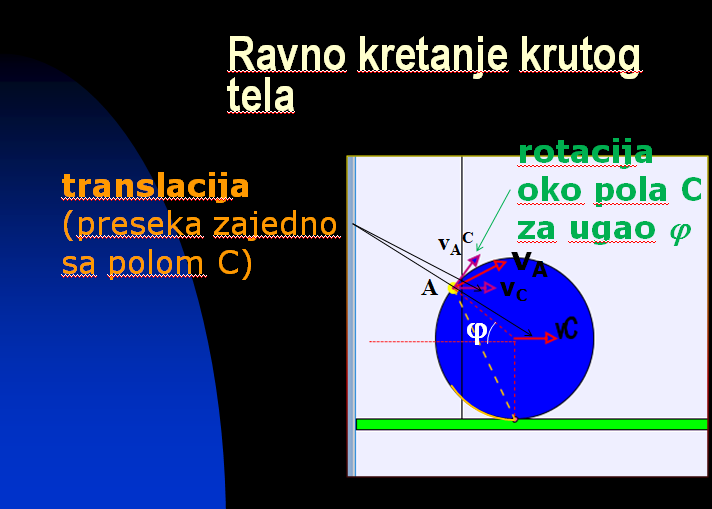
Ravno kretanje predstavlja kombinaciju dva najprostija kretanja
-
translacije
-
obrtanja oko ose čiji je pravac nepromenljiv a položaj u
prostoru promenjiv u toku vremena.
Pri kretanju krutog tela svi njegovi delići kreću se na isti način i opisuju iste putanje
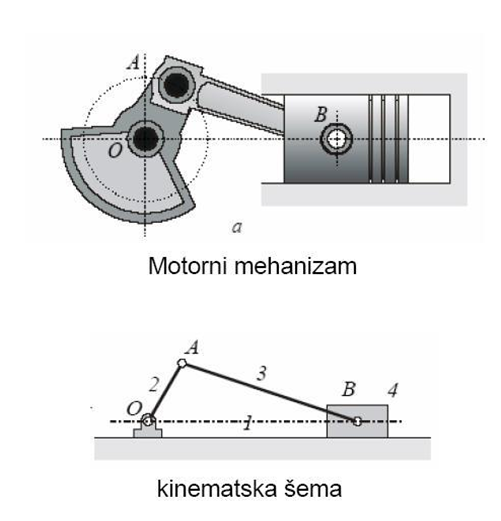
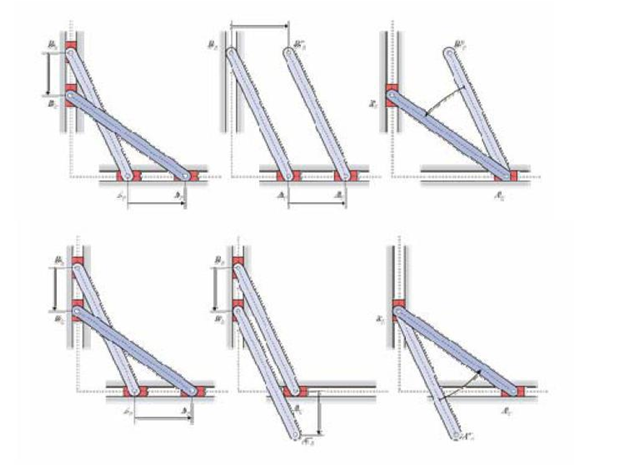
Primeri ravnog kretanja krutih tela
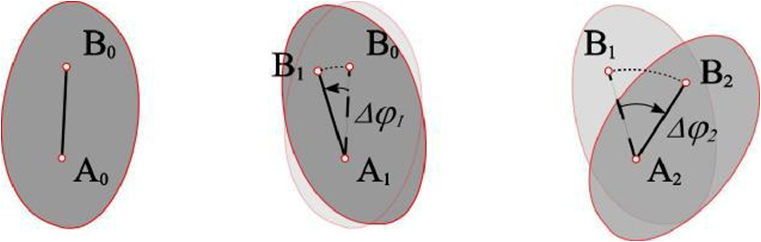
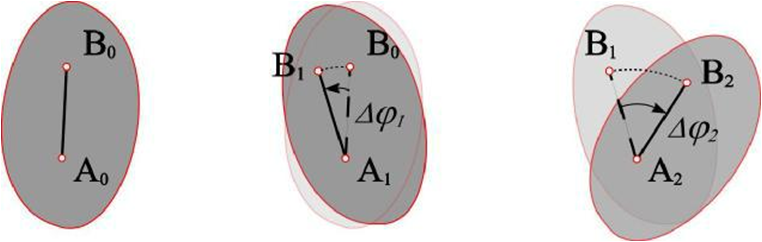
Pomeranje reprezentativnog preseka iz jednog položaja u drugi može da se ostvari
-
jednom translacijom (preseka zajedno sa polom C) i jednom rotacijom
oko pola C za ugao φ
-
samo jednom rotacijom oko ose čistog obrtanja.
Konačne jednačine kretanja krutog tela (zakoni ravnog kretanja):

Ravno kretanje krutog tela sa konstantnom ugaonom brzinom w
Jednačine ravnog kretanja točka za korak promene vremena od dt sekundi:


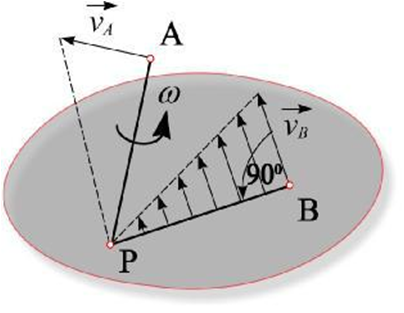
Trenutni pol brzina
Ravansko kretanje krutog tela može da se posmatra kao čisto obrtanje oko ose trenutnog obrtanja
U ravni preseka uvek postoji tačka čija je brzina jednaka nuli.
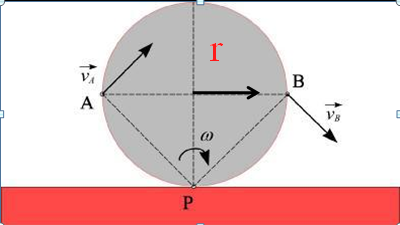
Kotrljanje bez klizanja cilindra po nepomičnoj površi
Pošto nema klizanja na mestu dodira točka i površi, brzina tačke cilindra kojom ovaj dodiruje površ jednaka je nuli. Prema tome ova tačka je trenutni pol brzina.
Brzine proizvoljnih tačaka A i B su:
vB = ω BP
vC=ω*r
Ubrzanje kod ravnog kretanja krutog tela
Jednačine ravnog kretanja točka za korak promene vremena od dt sekundi:

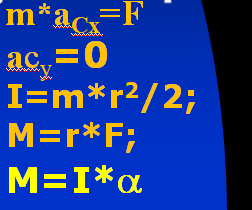
Ravno kretanje krutog tela sa ugaonim ubrzanjem a-dinamika
Slično kao i kod rotacije diska i ako dodamo translatorno kretanje centra: